【Follow me第二季第4期】任务二:IMU知识+IMU数据读取+IMU控制立方体
[复制链接]
在 Arduino® Nano RP2040 Connect 上,板载了一颗IMU传感器,集速度计、陀螺仪于一体,可以用于运动状态的获取和分析。
这篇分享,就来一起研究研究这个IMU传感器的使用。
一、认识板载IMU传感器
通过 Arduino® Nano RP2040 Connect 的官方资料,可以了解到板载的IMU传感器为LSM6DSOXTR:
 其具体位置,如下图所示:
其具体位置,如下图所示:
LSM6DSOXTR 是ST 生产的,从ST官方资料可以了解其功能:
IMU传感器通过检测加速度和角速度,从而感知在三维空间中的运动:【参考:IMU是什么? IMU(惯性测量单元)是一个…… |作者:Barak Or 博士 |走向数据科学】
二、从IMU传感器读取数据
在Arduino® Nano RP2040 Connect适配的micropython环境中,已经默认提供了该传感器的驱动程序,可以很方便的调用。
从Pinout可以了解,其使用IIC连接:
要从其读取数据,使用下面的代码即可:
import time
from machine import Pin, I2C
from lsm6dsox import LSM6DSOX
i2c = I2C(0, scl=Pin(13), sda=Pin(12))
lsm = LSM6DSOX(i2c)
while True:
accx, accy, accz = lsm.accel()
print(f"accel: x:{accx:.2f}m/s2, y:{accy:.2f}m/s2, z{accz:.2f}m/s2")
gyrox, gyroy, gyroz = lsm.gyro()
print(f"gyro: x:{gyrox:.2f}°/s, y:{gyroy:.2f}°/s, z{gyroz:.2f}°/s")
print("")
time.sleep(0.5)
上面的代码逻辑如下:
- 引入需要的模块:LSM6DSOX
- 实例化IIC接口
- 实例化传感器对象LSM6DSOX
- 在循环中读取加速度值和角速度值并输出
运行后,输出结果如下:
此时如果拿起来板子,就会看到上数值快速发生了变化。
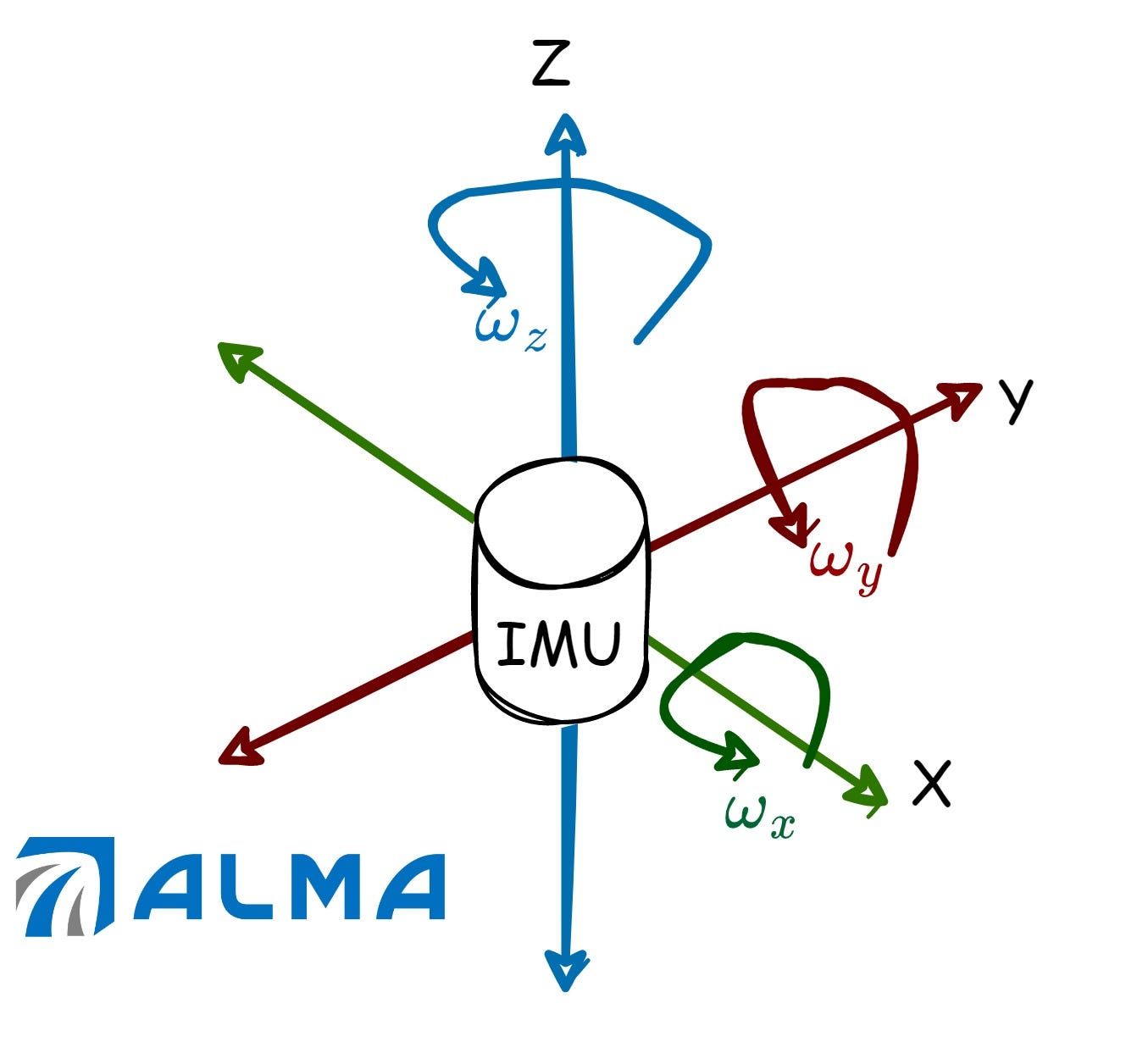
可以尝试不同的运动方式,观察数值变化的规律。
参考下面的图,沿不同轴向运动,则能够观察出更好的规律:
三、使用IMU数据控制立方体
1. Arduino® Nano RP2040 Connect 运行程序:
光看从IMU读取输出的数据,有点乏味,可以通过电脑结合,读取IMU的数据,在程序中控制一个立方体的呈现。
为了让电脑程序更好的获取IMU数据,开发板运行的程序,稍微修改一下:
import time
from machine import Pin, I2C
from lsm6dsox import LSM6DSOX
i2c = I2C(0, scl=Pin(13), sda=Pin(12))
lsm = LSM6DSOX(i2c)
while True:
accx, accy, accz = lsm.accel()
print(f"accel: x:{accx:.2f}m/s2, y:{accy:.2f}m/s2, z{accz:.2f}m/s2", end="")
gyrox, gyroy, gyroz = lsm.gyro()
print(f"\tgyro: x:{gyrox:.2f}°/s, y:{gyroy:.2f}°/s, z{gyroz:.2f}°/s")
#print("")
time.sleep(0.1)
把数据在一行输出,方便电脑上面读取和解析,实际输出的数据如下:
accel: x:-0.16m/s2, y:-0.40m/s2, z0.91m/s2 gyro: x:0.06°/s, y:0.31°/s, z0.12°/s
电脑上要读取 Arduino® Nano RP2040 Connect 输出的数据,可以直接使用 USB 串口,这样就不能和micropython 编辑器同时使用。
把上面的程序,保存到 Arduino® Nano RP2040 Connect 上的main.py,然后断开IDE的设备串口连接,并重新插拔开发板,即可开机自动运行。
此时,用串口工具查看 Arduino® Nano RP2040 Connect 的输出:
这样开发板的工作,就准备好了。
确保正常输出后,要关闭串口工具,这样子后面的程序才能使用串口和读取数据,否则会冲突。
2. 电脑程序编写
在电脑上,使用Python,可以很快编写一个从串口读取数据,解析数据,然后控制立方体的程序。
在电脑上使用Python来呈现3D物体和控制,需要用到:matplotlib、mpl_toolkits、numpy库,从串口读取数据还需要pyserial,可以使用下面的命令安装:
pip install numpy
pip install matplotlib
pip install mpl_toolkits
pip install pyserial
然后编写对应的程序:
import serial
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
import re
import time
# 串口配置
port = '/dev/cu.usbmodem14201' # 根据实际情况修改串口号
baud_rate = 115200
# 初始化串口
ser = serial.Serial(port, baud_rate, timeout=1)
# 初始化3D图形
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
# 固定位置
x, y, z = 0, 0, 0
roll, pitch, yaw = 0, 0, 0
# 更新3D物体的位置和姿态
def update_3d_object(ax, x, y, z, roll, pitch, yaw):
ax.clear()
ax.set_xlim([-10, 10])
ax.set_ylim([-10, 10])
ax.set_zlim([-10, 10])
# 绘制3D物体(这里用一个更大的立方体表示)
size = 2 # 立方体的边长
cube = np.array([
[x-size, y-size, z-size],
[x+size, y-size, z-size],
[x+size, y+size, z-size],
[x-size, y+size, z-size],
[x-size, y-size, z+size],
[x+size, y-size, z+size],
[x+size, y+size, z+size],
[x-size, y+size, z+size]
])
# 应用旋转矩阵
R = rotation_matrix(roll, pitch, yaw)
cube_rotated = np.dot(cube, R.T)
# 绘制立方体
colors = ['r', 'g', 'b', 'c', 'm', 'y'] # 不同的颜色
for i in range(4):
ax.plot([cube_rotated[i, 0], cube_rotated[(i+1) % 4, 0]],
[cube_rotated[i, 1], cube_rotated[(i+1) % 4, 1]],
[cube_rotated[i, 2], cube_rotated[(i+1) % 4, 2]], colors[i % 6])
ax.plot([cube_rotated[i+4, 0], cube_rotated[(i+1) % 4 + 4, 0]],
[cube_rotated[i+4, 1], cube_rotated[(i+1) % 4 + 4, 1]],
[cube_rotated[i+4, 2], cube_rotated[(i+1) % 4 + 4, 2]], colors[i % 6])
ax.plot([cube_rotated[i, 0], cube_rotated[i+4, 0]],
[cube_rotated[i, 1], cube_rotated[i+4, 1]],
[cube_rotated[i, 2], cube_rotated[i+4, 2]], colors[i % 6])
plt.draw()
plt.pause(0.001)
# 旋转矩阵
def rotation_matrix(roll, pitch, yaw):
Rx = np.array([[1, 0, 0],
[0, np.cos(roll), -np.sin(roll)],
[0, np.sin(roll), np.cos(roll)]])
Ry = np.array([[np.cos(pitch), 0, np.sin(pitch)],
[0, 1, 0],
[-np.sin(pitch), 0, np.cos(pitch)]])
Rz = np.array([[np.cos(yaw), -np.sin(yaw), 0],
[np.sin(yaw), np.cos(yaw), 0],
[0, 0, 1]])
return np.dot(Rz, np.dot(Ry, Rx))
# 读取并解析串口数据
def read_imu_data():
global roll, pitch, yaw
if ser.in_waiting > 0:
data = ser.readline().decode('utf-8').strip()
match = re.match(r'accel: x:(.*?)m/s2, y:(.*?)m/s2, z(.*?)m/s2\t?gyro: x:(.*?)°/s, y:(.*?)°/s, z(.*?)°/s', data)
if match:
accel_x, accel_y, accel_z, gyro_x, gyro_y, gyro_z = map(float, match.groups())
# 仅根据角速度更新姿态
dt = 0.1 # 假设采样间隔为0.1秒
roll += gyro_x * dt
pitch += gyro_y * dt
yaw += gyro_z * dt
print(data)
print("")
# 主循环
while True:
read_imu_data()
update_3d_object(ax, x, y, z, roll, pitch, yaw)
time.sleep(0.01)
上面程序的具体逻辑,就不详细说明了,感兴趣的可以研究一下。
重点在最后的主循环中的处理,先读取IMU的数据,就是前面输出的一行数据,然后使用读取到的数据,更新3D立方体的显示,然后延时继续。
运行上面的程序,具体效果如下:
视频如下:
iShot_2024-11-22_17.19.00
参考前面的测试,沿着不同的轴向运动,看到的效果会更好。
四、小结
上面只是演示了在 Arduino® Nano RP2040 Connect 上,LSM6DSOXTR IMU传感器的简单使用。
更进一步的,还可以通过该IMU传感器,来进行振动的检测、手势的识别、计步、倾斜度检测、自由落体、唤醒、单击和双击等等,其用途是非常广泛的。
|
 提升卡
提升卡 变色卡
变色卡 千斤顶
千斤顶
 1/6
1/6 




 京公网安备 11010802033920号
Copyright © 2005-2025 EEWORLD.com.cn, Inc. All rights reserved
京公网安备 11010802033920号
Copyright © 2005-2025 EEWORLD.com.cn, Inc. All rights reserved

