【Gravity:AS7341测评】+色彩传感器间的对比分析
[复制链接]
本帖最后由 jinglixixi 于 2020-12-26 09:35 编辑
在接触AS7341之前,也曾与一些色彩传感器打过交道,如TCS230、VEML6040等。
那他们都是什么样子呢?
为了便于对比,我们将他们放到同一镜头下,尺寸多少立见可知,详见图1所示。

图1 色彩传感器
如果按封装尺寸排个队它们依次是:
TCS230>TCS3200> AS7341> VEML6040(红色框内)
从使用的方便性来讲:
TCS230和TCS3200的使用方式基本一致,是通过独立的RGB色彩通道来分别读取色彩值的,其工作机制就是使用相应的滤色处理来完成。由于此类传感器多用在寻迹车的色彩轨迹识别上,故多靠反射光来识别色彩。此外,为了便于色彩的比对,在色彩检测前需要在当前的光源条件下进行一次白平衡,并将识别的色彩RGB值统一限定在0~255之内。
VEML6040的功能是对可见光进行色彩识别,这一点从它在开发板上的位置便可略知一二,因为它是对直射光进行色彩检测,故放在显示屏的同侧;若是检测反射光,它理应放在显示器的背面。用VEML6040检测色彩是无需进行白平衡的,它能直接给出光的色彩亮度值,其单位为lx。
AS7341从资料看它是将色彩分为8个色彩空间,参见图2所示。
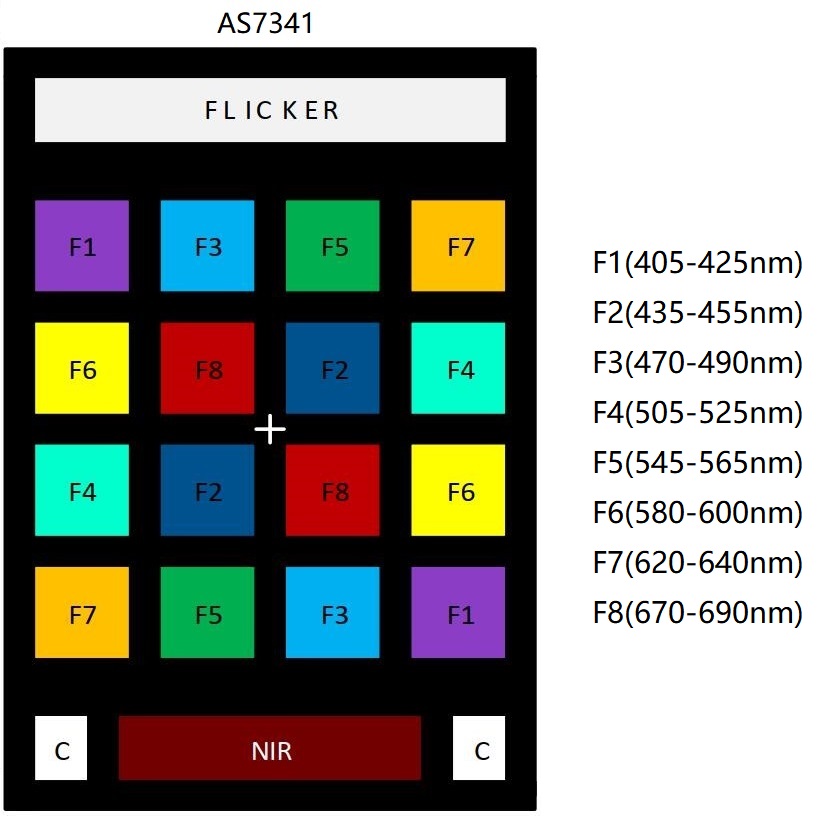
图2 AS7341的色彩空间划分
由色彩空间的标度可以看出它的检测单位为nm,是以波长为基准的,它在检测时也是无需进行白平衡的。
综上所述,尽管各种色彩传感器都能检测色彩,但工作原理还是各有侧重的,从测量单位就可管见一斑。此外,它们使用的场合也存在一定的差异,有的是靠反射光,有的则是直射光。
这里比较特殊的是TCS230和TCS3200,它在色彩检测前是需要进行白平衡的,而其他2种则不需要。另外,若使用TCS230和TCS3200设计色差检测仪是比较方便的。因为它的色彩值已被归一在0~255之内,可以通过色彩模式的变换而得到Lab值,进而可以分析出色差变化空间。
后面我们的任务是让AS7341运行起来,为待测的色彩提供出标定值。
| 
 提升卡
提升卡 变色卡
变色卡 千斤顶
千斤顶



 1/8
1/8 




 京公网安备 11010802033920号
Copyright © 2005-2025 EEWORLD.com.cn, Inc. All rights reserved
京公网安备 11010802033920号
Copyright © 2005-2025 EEWORLD.com.cn, Inc. All rights reserved

