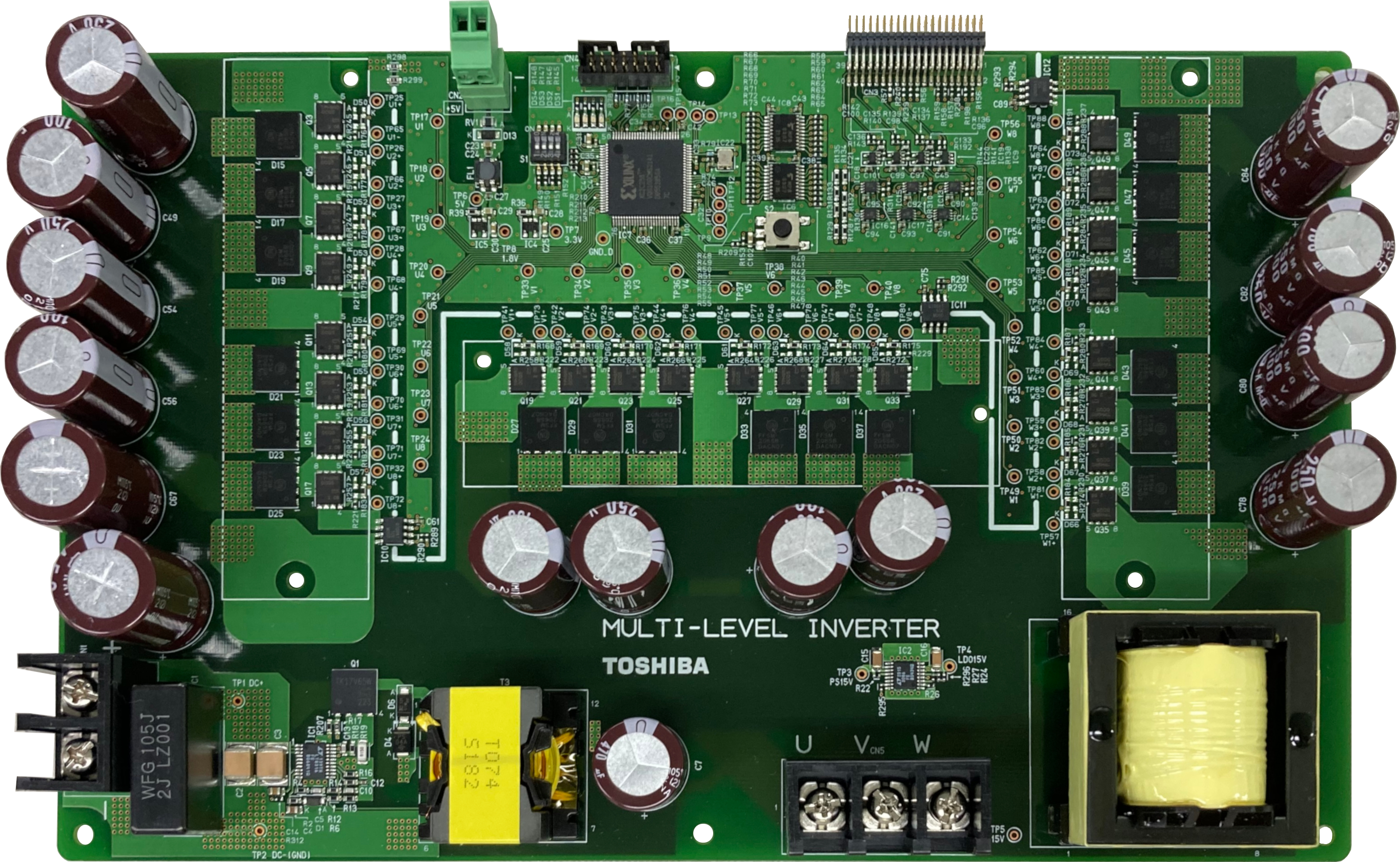
该参考设计提供了具有5电平输出的3相多电平逆变器的设计指南、数据和其他内容。其采用150V MOSFET驱动AC 200V电机。
- 小体积,高性能,很好。
- 精准
- 无
- 无霍尔矢量控制方式对算法要求很高
- 感觉很不错
- 采样MOSFET的3相多电平逆变器能驱动AC 200V电机 非常实用!
- 3相多变,好用又实用。
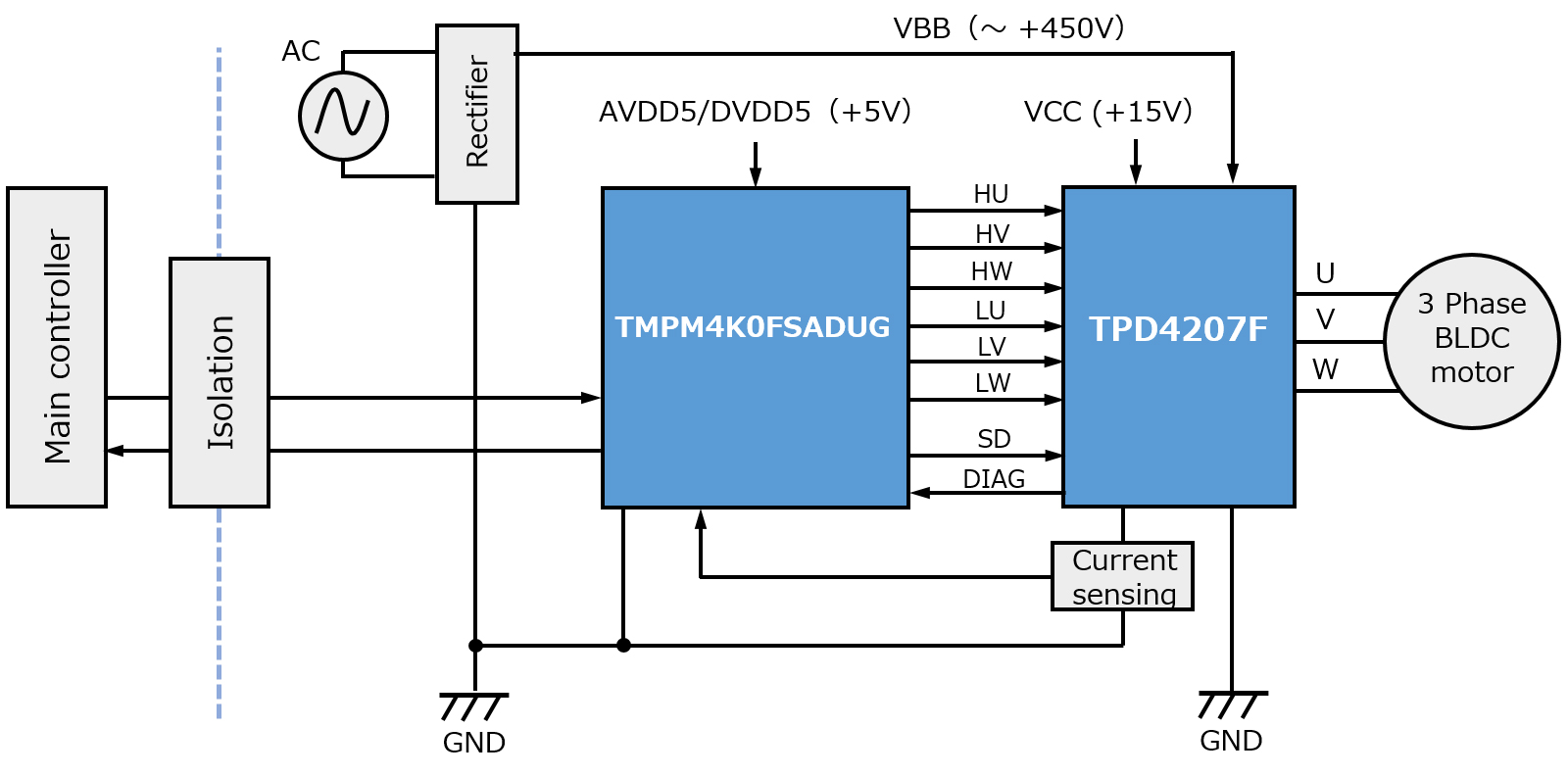
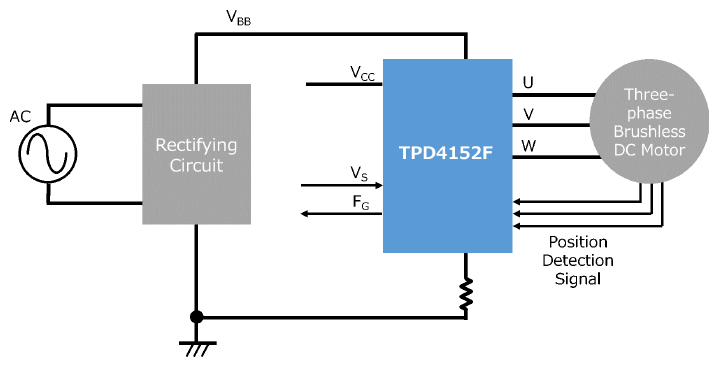
使用TPD4204F的DC 300V输入BLDC电机无霍尔控制电路
该参考设计提供了使用智能功率器件的直流300V输入BLDC电机无霍尔控制电路的设计指南、数据和其他内容。它采用专为电机控制而设计的MCU实现矢量控制。
- 精准
- 方案还提供PCB设计参考,拿来就能打板验证
- 感觉很不错
- 使用TPD4204F的DC 300V输入BLDC电机无霍尔控制电路,能实现电机的矢量控制,非常值得收藏
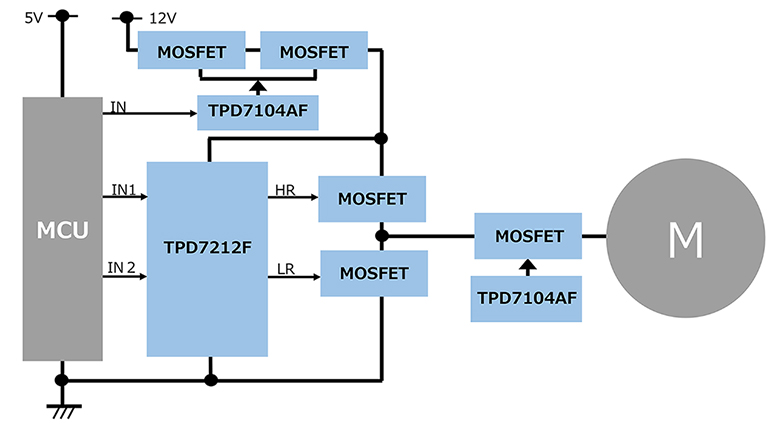
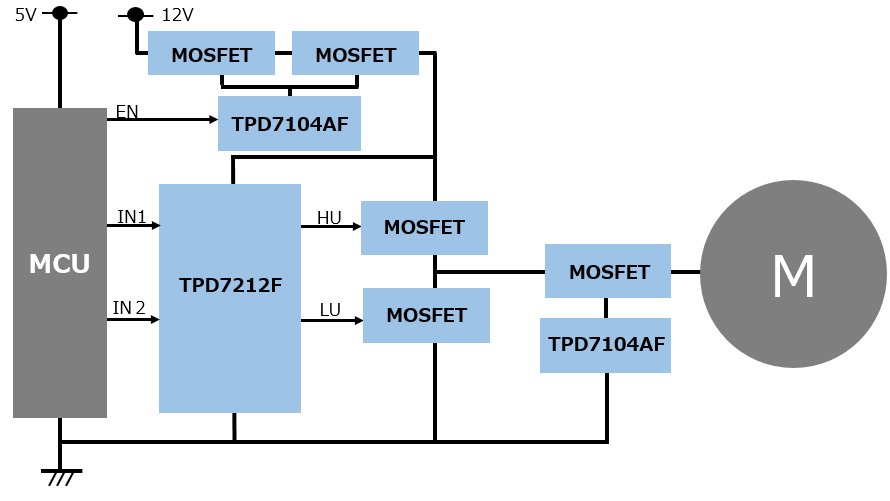
该参考设计提供具有过流保护、反向电源连接保护等功能的TPD7212F/FN的应用电路和仿真示例。
- 外围简单,性能强,很好。
- 感觉很不错!!
- 用于车载和工业直流电机的H桥驱动电路,具有过流保护,反向电源连接保护,非常值得参考
- 3相多变,好用又实用,H桥驱动电路,设计先进。
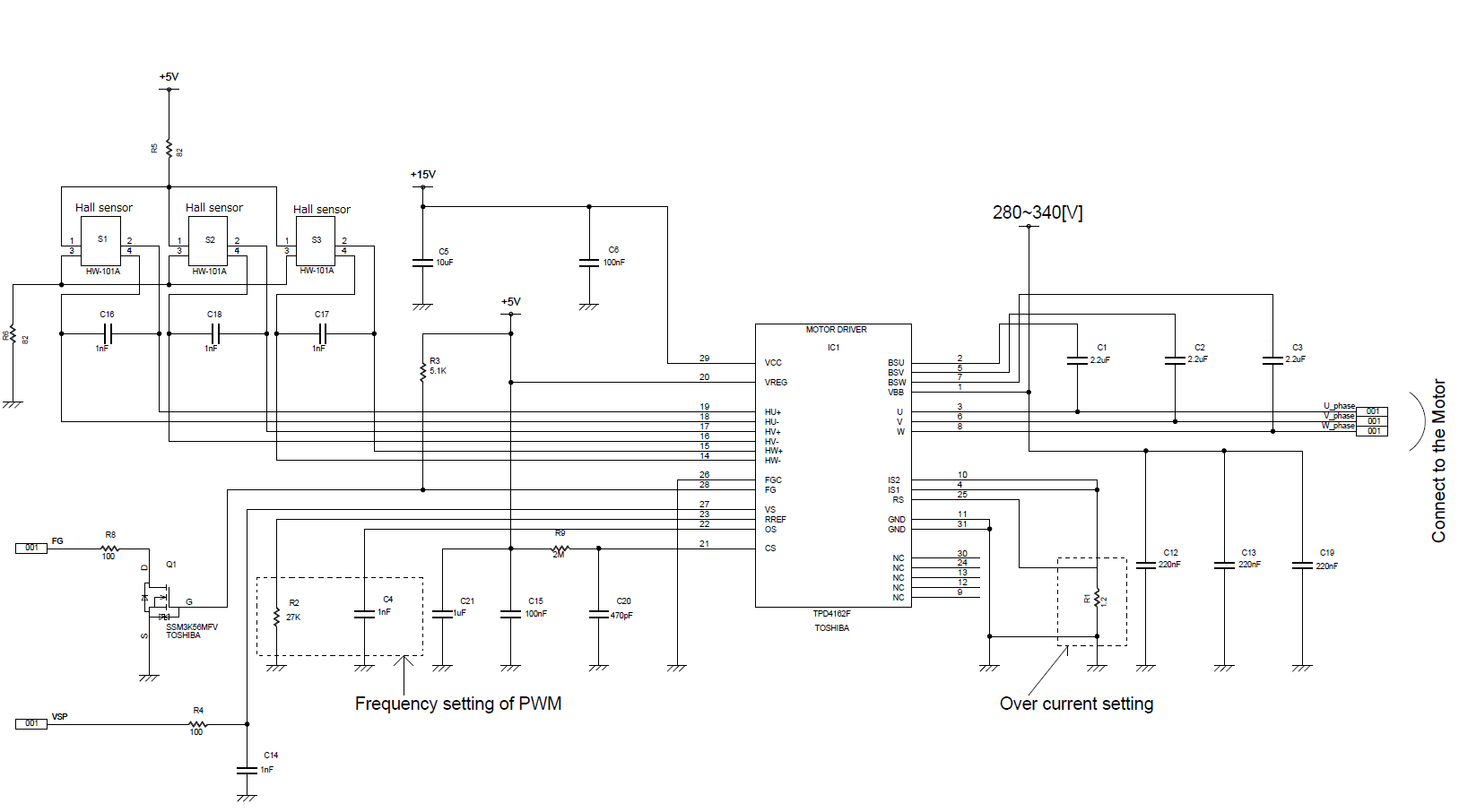
使用TPD4162F的紧凑型方波控制无刷直流电动机驱动器。该参考设计介绍电路和PCB的设计方法,例如常数的计算。
- 将高电压电源侧和低电压信号侧的端子分开安装有以下几个作用: 1. 安全性:高电压电源具有较高的电压和电流,如果与低电压信号混在一起,可能会导致电路短路、电击等安全问题。通过将它们分开安装,可以减少这些风险。 2. 电磁干扰:高电压电源会产生较强的电磁场,可能对低电压信号产生干扰,导致信号质量下降。通过分开安装,可以减少电磁干扰的影响。 3. 电气隔离:分开安装高电压电源和低电压信号可以实现电气隔离,防止高电压电源的干扰传递到低电压信号电路中。 自举电路是一种用于提供电源给某些电路的技术。它的作用是通过使用电路自身的输出信号来产生所需的电源电压或电流。这种技术可以减少外部电源的需求,提高系统的效率和可靠性。 使用IGBT(绝缘栅双极型晶体管)实现3相桥输出是一种常见的电力电子应用。IGBT是一种功率开关器件,可以控制高电压和高电流。通过适当的控制信号,可以实现3相桥输出,用于驱动电机、变频器等应用。 霍尔元件输入是指将霍尔元件作为输入传感器,通过测量磁场的变化来检测物体的位置、速度等信息。霍尔元件是一种基于霍尔效应的传感器,可以将磁场的变化转换为电压信号。 霍尔IC输入是指使用霍尔集成电路(Hall IC)作为输入传感器。霍尔IC集成了霍尔元件、信号调理电路和输出电路,可以直接输出数字信号,提供更方便的接口和信号处理功能。它通常用于磁场检测、位置控制等应用。
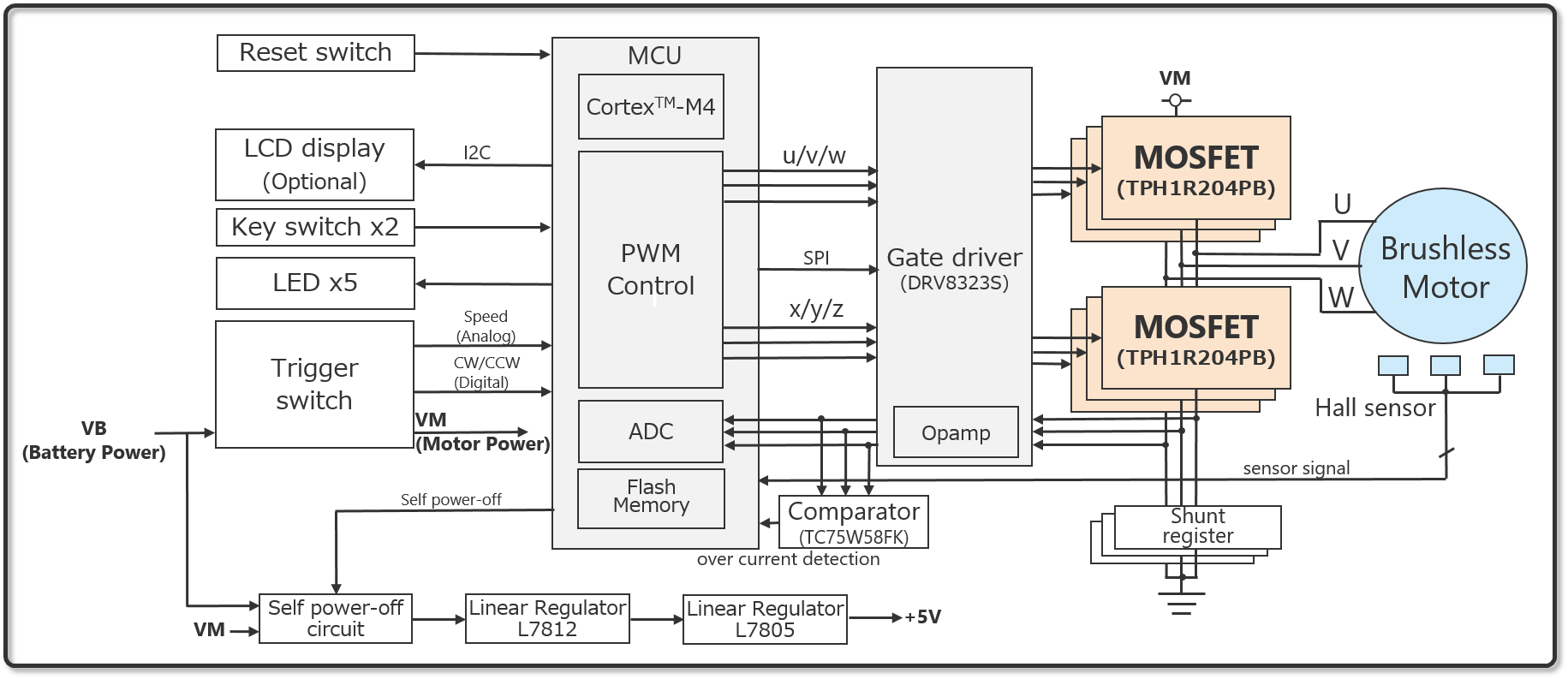
小型封装中使用低损耗器件TPH1R204PB的无绳电动工具的电机驱动器。电机速度由MCU控制。电路设计方法的说明。
- 这个电路设计很优秀
- 方波驱动和正弦波驱动是两种不同的电机驱动方式。 1. 方波驱动:方波驱动是一种简单的驱动方式,通过将电流以方波的形式传递给电机,使电机在不同的时间段内以不同的速度运转。方波驱动具有简单、成本低的优点,但是由于方波信号的特性,会产生较多的谐波,导致电机振动和噪音较大。 2. 正弦波驱动:正弦波驱动是一种更为精确的驱动方式,通过将电流以正弦波的形式传递给电机,使电机以更加平滑的方式运转。正弦波驱动可以减少电机振动和噪音,提高电机的效率和稳定性,但是由于需要更复杂的电路和控制系统,成本较高。 方波驱动适用于一些简单的应用场景,而正弦波驱动适用于对电机运转平稳性和噪音要求较高的场景。
- 很适合筋膜枪的应用
- 一个不错的控制电路
TPD4204F和TB6634FNG正弦波控制型直流无刷电机驱动IC的应用电路
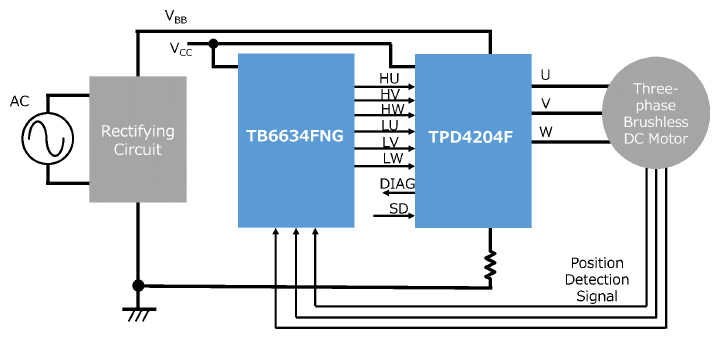
该参考设计提供了使用霍尔器件/IC的示例电路和设计指南。TPD4204F具有600V额定电压和内置PWM,可通过符号波控制驱动BLDC电机。
- 点击“发表评论”按钮,为心仪的参考设计打call
TPD4206F和TB6634FNG正弦波控制型无刷直流电机驱动IC的应用电路
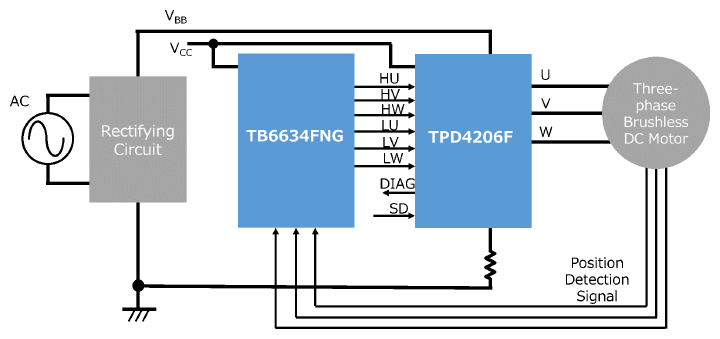
该参考设计提供了使用霍尔器件/IC的示例电路和设计指南。TPD4206F具有500V额定电压和内置PWM,可通过符号波控制驱动BLDC电机。
- 点击“发表评论”按钮,为心仪的参考设计打call
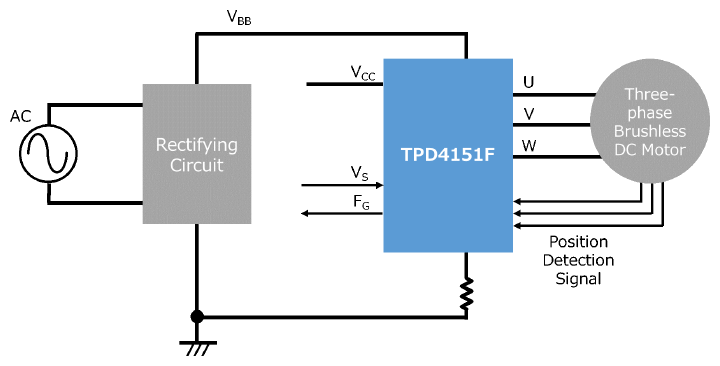
该参考设计提供了使用霍尔器件/IC 的示例电路和设计指南。TPD4151F额定电压为250V,内置PWM,可通过方波控制驱动BLDC电机。
- 点击“发表评论”按钮,为心仪的参考设计打call
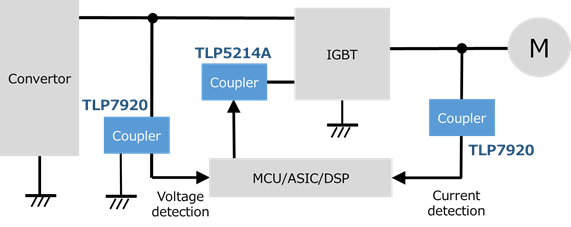
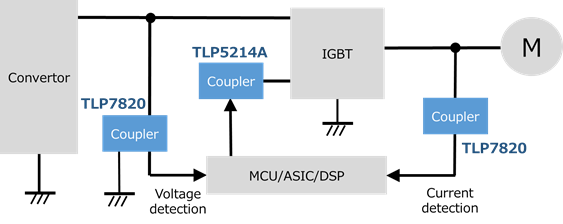
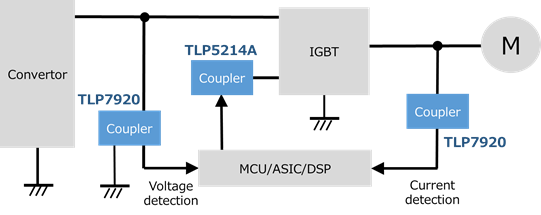
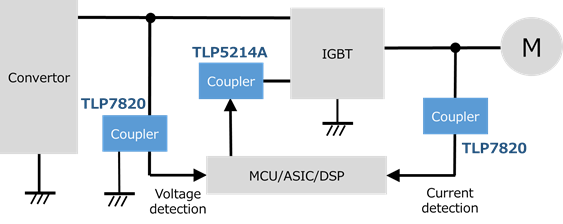
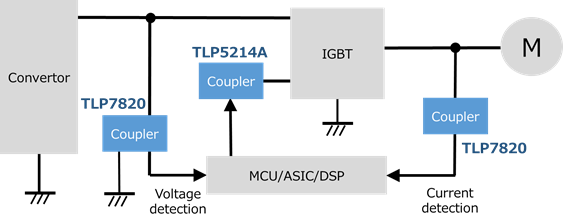
该参考设计提供了用于伺服和逆变器电机控制的光隔离放大器相电流检测的设计指南和仿真波形示例。
- 隔离电压电流采集要么在信号侧给电源、给常规采集电路,给数字通信口,然后用数字隔离芯片把值传到处理器侧。共模电压低或着变化小的好处理,直接霍尔器件,但是对于高共模的来看,还是隔离芯片给力,元件少、简单、可靠。
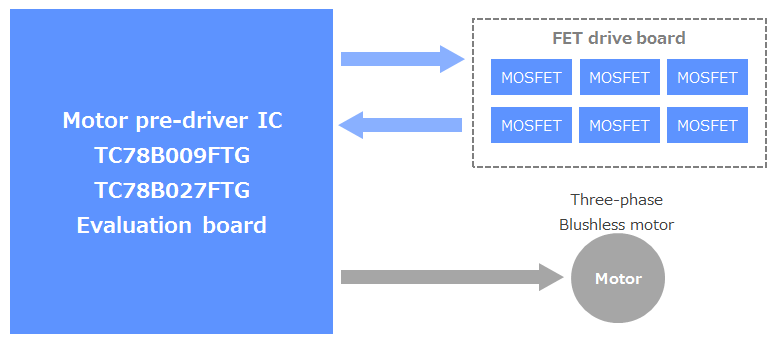
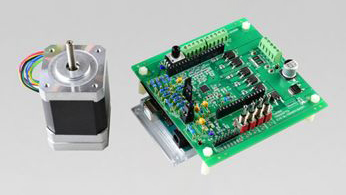
该参考设计提供了3相无刷直流电动机预驱IC(TC78B009FTG/TC78B027FTG)和可连接的外部FET驱动板的评估板的电路图、BOM和PCB数据(Gerber数据)。
- 点击“发表评论”按钮,为心仪的参考设计打call
用于风扇驱动的直流无刷电机预驱IC TC78B027FTG的应用电路
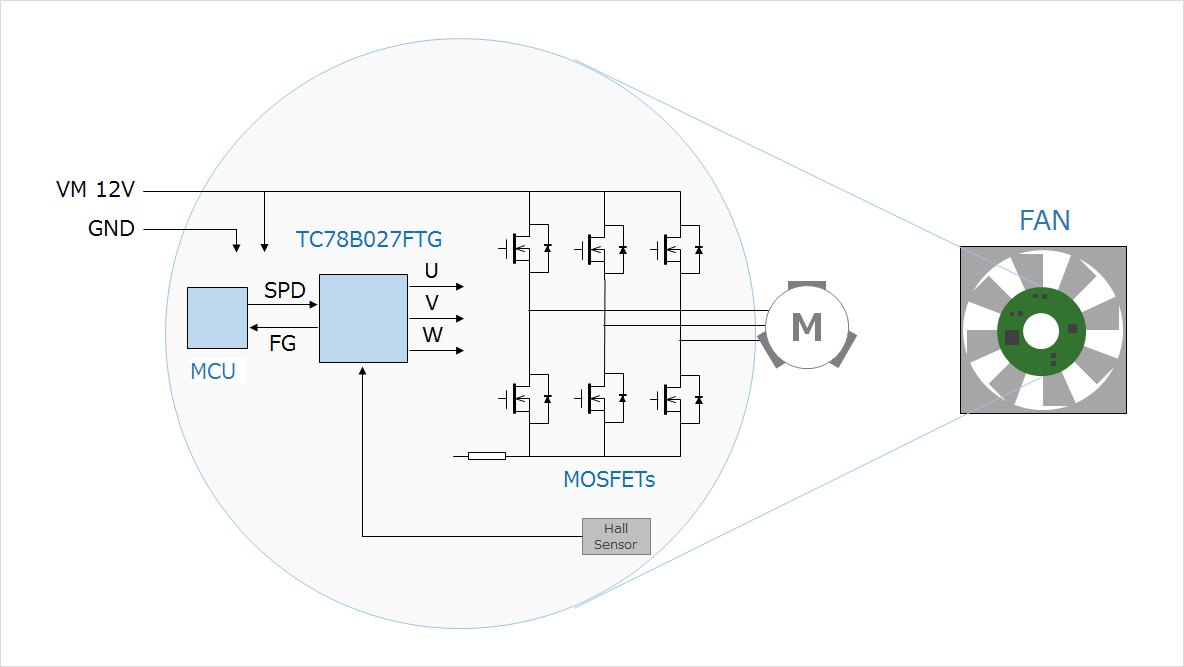
该电路板根据风扇的形状设计成圆形中空外形,板上装有用于电机驱动的MOSFET,直流无刷电机预驱动IC TC78B027FTG和用于控制的微控制器。该参考设计提供电路图,BOM等。
- 点击“发表评论”按钮,为心仪的参考设计打call
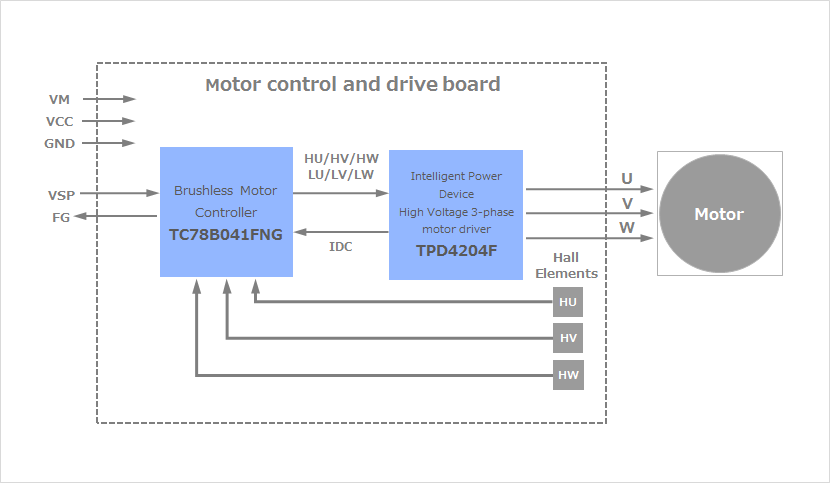
该电路板根据风扇的形状设计成圆形中空外形,板上有直流无刷电机控制器IC TC78B041FNG和高压电机驱动IC TPD4204F,该参考设计提供电路图,BOM清单等。
- 点击“发表评论”按钮,为心仪的参考设计打call
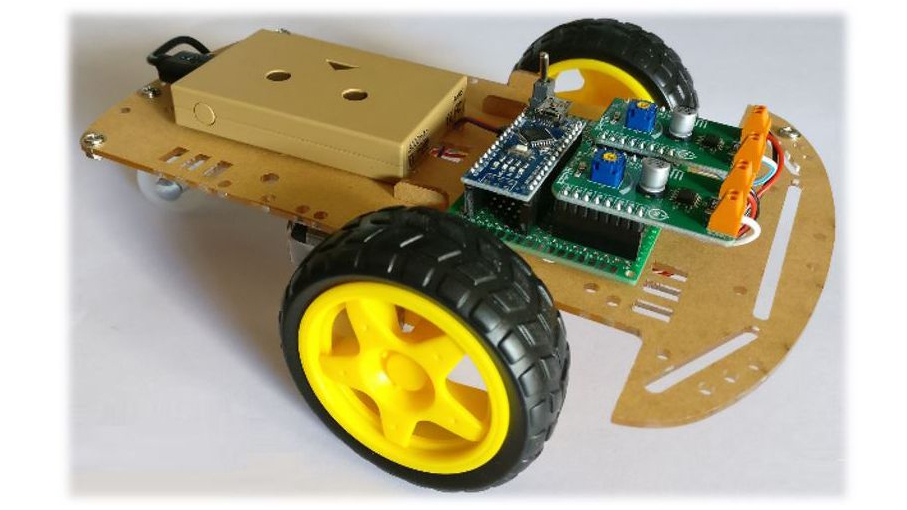
采用直流有刷电机驱动IC TB67H450FNG的评估板的DIY汽车构建指南,介绍所使用的元件、框图和软件配置等。
- 这个不错
- 下面是一个使用Arduino Nano控制系统和生成PWM信号的代码示例: ``` // 定义引脚 const int pwmPin = 9; // PWM输出引脚 void setup() { // 初始化串口通信 Serial.begin(9600); // 配置引脚模式 pinMode(pwmPin, OUTPUT); } void loop() { // 读取串口输入的控制信号 if (Serial.available()) { int pwmValue = Serial.parseInt(); // 读取整数值 // 将控制信号限制在0到255之间 pwmValue = constrain(pwmValue, 0, 255); // 输出PWM信号 analogWrite(pwmPin, pwmValue); // 打印输出PWM值 Serial.print("PWM值: "); Serial.println(pwmValue); } } ``` 这个代码示例中,使用Arduino Nano的PWM输出引脚(引脚9)来控制外部设备。在`setup()`函数中,我们初始化了串口通信和配置了PWM输出引脚的模式。在`loop()`函数中,我们读取串口输入的控制信号,并将其限制在0到255之间。然后,我们使用`analogWrite()`函数将PWM信号输出到PWM引脚上。最后,通过串口打印输出PWM值。还可以通过串口发送0到255之间的整数值来控制PWM信号的占空比。 不知道这段代码是否可以运行起来?有没有什么缺少的部分?
- 非常不错的方案和选择
- 小巧秀气,点赞
该参考设计使用东芝的3相直流无刷电机驱动IC TB6605FTG提供电机控制闭环系统。该开发板被设计为Arduino UNO平台的插入板(Shield)。
- Arduino UNO是一种基于开源硬件的微控制器,可以用于控制各种电子设备。对于正弦波BLDC电机控制器,Arduino UNO可以用来生成PWM信号,控制电机的速度和方向。
这是一个简单的Arduino UNO控制正弦波BLDC电机的代码:
```cpp
#include
Servo motor1; Servo motor2; Servo motor3; int speed = 0; void setup() { motor1.attach(9); // 连接电机1的PWM引脚 motor2.attach(10); // 连接电机2的PWM引脚 motor3.attach(11); // 连接电机3的PWM引脚 } void loop() { // 设置电机转速 motor1.writeMicroseconds(speed); motor2.writeMicroseconds(speed); motor3.writeMicroseconds(speed); // 逐渐增加电机速度 speed += 10; if (speed > 2000) { speed = 1000; // 限制最大速度 } delay(1000); // 延迟1秒 } ``` 在上面的代码中,使用了Servo库来控制电机的PWM信号。通过调整`speed`变量的值,可以改变电机的转速。代码中的`delay(1000)`函数用于延迟1秒,以便观察电机转速的变化。 上述代码仅适用于具有3个相位的正弦波BLDC电机,且电机的控制引脚分别连接到Arduino UNO的9、10和11引脚。实际情况可能会有所不同,具体的控制方式和引脚连接需要根据电机和控制器的规格进行调整。 不知道这段代码是否可以运行起来?有没有什么缺少的部分? - 非常不错的电机控制方案