全志T113双核异构处理器的使用基于Tina Linux5.0——RTOS编译开发说明
**3、RTOS编译开发说明****3.1、RTOS SDK与TinaLinux开发环境**
RTOS SDK相关代码已集成到Tina Linux开发环境,Tina Linux开发环境下的rtos子目录即为RTOS开发环境。
```
├──brandy
├──bsp
├──build
├──buildroot
├──build.sh >build/top_build.sh
├──device
├──kernel
├──openwrt
├──out
├──platform
├──prebuilt
├──rtos #RTOS环境
├──tee_kit
├──test
└──tools
```
**3.2、RTOS编译**
Tina集成了RTOS的编译、打包功能,而且适用于openwrt、buildroot等文件系统。这里以T113 S4平台作为例子进行阐述。
**3.2.1、关联RTOS方案**
TinaLinux的SDK中,SDK根目录下有device目录,该目录存放的是不同处理器平台及主板的配置,以SBC-T113S4_NAND为例,它是以T113_S4为主控制器的,其配置文件就存放在device/config/chips/t113_s4/configs/sbc_t113s4_nand目录下,那么该主板如何关联RTOS方案呢?
```
xxx@xxx:~/workspace/t113_tina5.0/t113_tinasdk5.0-v1/device/config/chips/t113_s4/configs/sbc_t113s4_nand$ tree -l
.
├── bin
│ ├── amp_dsp0.bin
│ └── amp_rv0.bin
├── BoardConfig.mk //关联RTOS项目的关键
├── board.dts -> linux-5.4/board.dts
├── bsp
│ ├── env.cfg
│ └── sys_partition.fex
├── buildroot
│ ├── BoardConfig.mk
│ ├── BoardConfig_nor.mk
│ ├── bootlogo.bmp
│ ├── env_nor.cfg
│ ├── swupdate
│ │ ├── env_ab.cfg
│ │ ├── sw-description-ab
│ │ ├── sw-description-ab-rdiff
│ │ ├── sw-description-recovery
│ │ ├── sw-description-recovery-sign
│ │ ├── sw-subimgs-ab.cfg
│ │ ├── sw-subimgs-ab-rdiff.cfg
│ │ ├── sw-subimgs-recovery.cfg
│ │ ├── sw-subimgs-recovery-secure.cfg
│ │ ├── sw-subimgs-recovery-sign.cfg
│ │ ├── sys_partition_ab.fex
│ │ └── sys_partition_recovery.fex
│ ├── sys_partition.fex
│ └── sys_partition_nor.fex
├── linux-5.4
│ ├── board_backup.dts
│ ├── board.dts
│ ├── board_lvds1024x600.dts
│ ├── board_lvds1024x768.dts
│ ├── board_old.dts
│ ├── board_spi4bit_drv30.dts
│ ├── board_spi4bit.dts
│ ├── board_spi_sbc-t113s_v1p0.dts
│ ├── board_tft1024x600.dts
│ ├── board_uart3.dts
│ ├── board_xr829_sbc-t113s_v1p1.dts
│ ├── config-5.4
│ ├── config-5.4-recovery
│ ├── config_uart3-5.4
│ ├── env.cfg
│ ├── env_uart3.cfg
│ └── sys_partition.fex
├── openwrt
│ ├── bootlogo.bmp
│ ├── sys_partition.fex
│ └── sys_partition_nor.fex
├── sys_config.fex
├── sys_config_old.fex
├── sys_config_uart3.fex
├── uboot-board_backup.dts
├── uboot-board.dts
├── uboot-board-lvds-lcd1024x600.dts
├── uboot-board_spi0_1wire.dts
├── uboot-board_spi_sbc-t113s_v1p0.dts
├── uboot-board_spi_sbc-t113s_v1p1.dts
└── uboot-board-tft-lcd1024x600.dts
```
在这些配置文件中有一个文件BoardConfig.mk,它就是关联RTOS应用的关键,这个文件的内容如下:
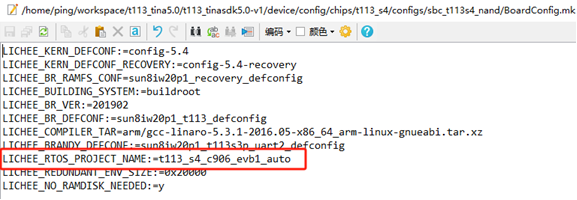
配置RTOS方案名的关键字段LICHEE_RTOS_PROJECT_NAME:=xxxxx。以我司SBC-T113S主板为例,在BoardConfig.mk中配置的是t113_s4_c906_evb1_auto的RTOS方案。开发者可以通过修改LICHEE_RTOS_PROJECT_NAME字段,更改构建RTOS方案。
先进入Tina的rtos目录,rtos目录的内容如下:
```
├──board
├──envsetup.sh >tools/scripts/source_envsetup.sh
├──lichee
├──out
└──tools
```
执行如下指令进行RTOS的环境配置
```
source envsetup.sh #配置环境变量
```
我们看到可以选择的RTOS方案,即是LICHEE_RTOS_PROJECT_NAME字段可以配置的RTOS方案。
```
last=t113_s4_c906_evb1_auto
You're building on Linux
Lunch menu... pick a combo:
1. t113_i_c906_evb1_auto
2. t113_s3p_c906_evb1_auto
3. t113_s3p_c906_evb1_auto_fastboot
4. t113_s3p_c906_evb1_auto_fastboot_video
5. t113_s3p_c906_evb1_auto_non_os
6. t113_s3p_c906_example_demo
7. t113_s4_c906_evb1_auto
8. t113_s4_c906_evb1_auto_fastboot_video
9. t113_s4p_c906_evb1_auto
Which would you like? :
```
从以上RTOS的方案中,可以看到有支持t113-i处理器的,也有支持t113_s4处理器的,当前默认是t113_s4_c906_evb1_auto,这个是基于t113_s4处理器的方案。另外,这个方案是可以添加的,如果主板是基于T113I的,可以把t113_i_c906_evb1_auto作为蓝本增加自己方案,如果主板是基于T113-S4的,可以把t113_i_c906_evb1_auto作为蓝本增加自己方案。如何添加方案请看本手册的第六章节。
**3.2.2、单独编译RTOS方案**
执行lunch_rtos进行编译方案选择后,可以通过mrtos_menuconfig进行方案的配置,配置完成后即可通过m或者mrtos指令进行RTOS的编译。
```
xxx@xxx:~/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos$ lunch_rtos
last=t113_s4_c906_evb1_auto
You're building on Linux
Lunch menu... pick a combo:
1. t113_i_c906_evb1_auto
2. t113_s3p_c906_evb1_auto
3. t113_s3p_c906_evb1_auto_fastboot
4. t113_s3p_c906_evb1_auto_fastboot_video
5. t113_s3p_c906_evb1_auto_non_os
6. t113_s3p_c906_example_demo
7. t113_s4_c906_evb1_auto
8. t113_s4_c906_evb1_auto_fastboot_video
9. t113_s4p_c906_evb1_auto
Which would you like? : 7
select=7...
t113_s4_c906/evb1_auto
'/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/projects/t113_s4_c906/evb1_auto/defconfig' -> '/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/.config'
============================================
RTOS_BUILD_TOP=/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos
RTOS_TARGET_ARCH=riscv
RTOS_TARGET_CHIP=sun8iw20p1
RTOS_TARGET_DEVICE=t113_s4_c906
RTOS_PROJECT_NAME=t113_s4_c906_evb1_auto
============================================
Run mrtos_menuconfig to config rtos
Run m or mrtos to build rtos
```
以上提示我们通过mrtos_menuconfig可以进行应用的配置,执行结果如下:
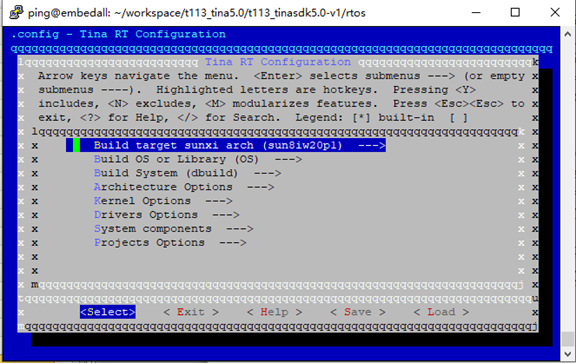
从配置情况看,和Linux的内核配置比较接近,也是可以配置各种驱动外设,见下图:
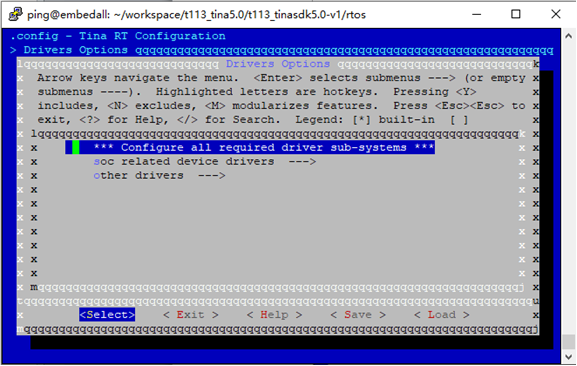
T113系列拥有双核Cortex-A7核心,也拥有RV64-C906核心,这两个核心使用的外设是共通的,因此选择C906选择外设的时候,要避开Cortex-A7已经使用的外设。例如:Cortex-A7核心已经把PE2/PE3这两个GPIO作为UART来使用,C906就不能再使用PE2/PE3。
另外,这里要明确的一点是:每个RTOS应用也是有对应的配置文件的,对于t113_s4_c906_evb1_auto这个项目的配置文件在如下目录:
```
TinaSDK所在目录/rtos/lichee/rtos/projects/t113_s4_c906/evb1_auto/defconfig
```
配置完成后即可执行m或者mrtos执行进行编译,指令执行结果如下:
```
xxx@xxx:~/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos$ mrtos
build rtos ...
===There isn't tina environment.===
Note: will use shell command origin rather than the functon.
Dark Builder
Version (1.6.0 - BiCEP2 (Gravitational Waves))
* build/t113_s4_c906_evb1_auto/img/sys_config.fex
.dbuild/..//include/generated/t113_s4_c906_evb1_aut o/autoconf.h
projects/t113_s4_c906/evb1_auto/freertos.lds
CC build/t113_s4_c906_evb1_auto/arch/common/version.o
LD build/t113_s4_c906_evb1_auto/arch/common/obj-in.o
LD build/t113_s4_c906_evb1_auto/arch/obj-in.o
build/t113_s4_c906_evb1_auto/img/rt_system.elf
if [ -n /home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/bu ild/t113_s4_c906_evb1_auto/img/]; then mkdir -p /home/ping/workspace/t113_tina 5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t113_s4_c906_evb1_auto/img; fi
Memory region Used SizeRegion Size%age Used
RAM: 214096 B 6 MB 3.40%
* build/t113_s4_c906_evb1_auto/img/rt_system.syms
* build/t113_s4_c906_evb1_auto/img/rt_system.bin
text data bss dec hex filename
134576 69048 10472214096 34450 build/t113_s4_c906_evb1_auto/img/rt_syst em.elf
copying /home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/bu ild/t113_s4_c906_evb1_auto/img/rt_system.bin to /home/ping/workspace/t113_tina5. 0/t113_tinasdk5.0-v1/rtos/board/t113_s4_c906/evb1_auto/bin/freertos.fex
#### make completed successfully
'/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t11 3_s4_c906_evb1_auto/img/rt_system.bin' -> '/home/ping/workspace/t113_tina5.0/t11 3_tinasdk5.0-v1/rtos/board/t113_s4_c906/evb1_auto/bin/rtos_riscv_sun8iw20p1.fex'
ping@embedall:~/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos$
```
从以上信息我们得到一些信息,编译出来的固件名字是freertos.fex/rtos_riscv_sun8iw20p1.fex,其实两个固件是一样的。固件是编译出来,但是这个固件如何打包到Tina生成的根文件系统中呢?请看下一章。
**3.2.3、在Tina下编译RTOS方案**
在TinaSDK根目录中,先选择好整体平台方案,见如下说明:
* buildroot方案
1、首先使用如下命令选择整体平台方案
```
./build.sh config
```
2、然后RTOS相关操作命令如下
```
./build.sh rtos #单独编译RTOS方案
./build.sh rtos menuconfig #修改RTOS配置文件
./build.sh rtos clean #清除RTOS编译中间文件
```
注意:执行./build.sh不会编译RTOS
* openwrt方案
1、首先使用如下命令选择整体平台方案
```
source build/envsetup.sh #生效环境变量
lunch #选择openwrt方案
```
2、执行make会先编译RTOS,再编译Tina
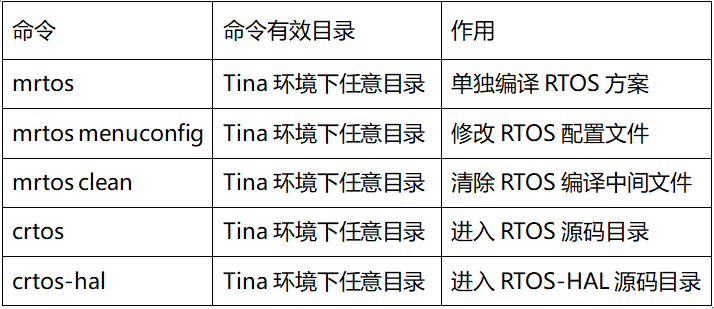
* 快捷命令
在Tina根目录下,执行了source build/envsetup.sh配置环境后,可使用RTOS快捷命令进行RTOS的配置和编译等。
**3.3、RTOS固件打包**
我们以编译openwrt方案为例,在的编译openwrt的过程中,会首先编译RTOS,然后将生成的镜像文件自动拷贝到对应平台方案中,并且rt_system.elf重名为amp_rv0.bin,见如下信息:
```
xxx@xxx:~/workspace/t113_tina5.0/t113_tinasdk5.0-v1$ make -j32
===There is tina environment.===
Note: make is the shell functon in envsetup.sh.
== action: openwrt_build, action_args: -j32 ==
========ACTION List: build_rtos ;========
options :
INFO: build rtos ...
Setup env done!
Run lunch_rtos to select project
last=t113_s4_c906_evb1_auto
select=t113_s4_c906_evb1_auto...
t113_s4_c906/evb1_auto
'/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/projects/t113_s4_c906/evb1_auto/defconfig' -> '/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/.config'
============================================
RTOS_BUILD_TOP=/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos
RTOS_TARGET_ARCH=riscv
RTOS_TARGET_CHIP=sun8iw20p1
RTOS_TARGET_DEVICE=t113_s4_c906
RTOS_PROJECT_NAME=t113_s4_c906_evb1_auto
============================================
Run mrtos_menuconfig to config rtos
Run m or mrtos to build rtos
build rtos ...
Dark Builder
Version (1.6.0 - BiCEP2 (Gravitational Waves))
* build/t113_s4_c906_evb1_auto/img/sys_config.fex
.dbuild/..//include/generated/t113_s4_c906_evb1_auto/autoconf.h
projects/t113_s4_c906/evb1_auto/freertos.lds
CC build/t113_s4_c906_evb1_auto/arch/common/version.o
LD build/t113_s4_c906_evb1_auto/arch/common/obj-in.o
LD build/t113_s4_c906_evb1_auto/arch/obj-in.o
build/t113_s4_c906_evb1_auto/img/rt_system.elf
if [ -n /home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t113_s4_c906_evb1_auto/img/]; then mkdir -p /home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t113_s4_c906_evb1_auto/img; fi
Memory region Used SizeRegion Size%age Used
RAM: 214096 B 6 MB 3.40%
* build/t113_s4_c906_evb1_auto/img/rt_system.bin
* build/t113_s4_c906_evb1_auto/img/rt_system.syms
text data bss dec hex filename
134576 69048 10472214096 34450 build/t113_s4_c906_evb1_auto/img/rt_system.elf
copying /home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t113_s4_c906_evb1_auto/img/rt_system.bin to /home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/board/t113_s4_c906/evb1_auto/bin/freertos.fex
#### make completed successfully
'/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t113_s4_c906_evb1_auto/img/rt_system.bin' -> '/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/board/t113_s4_c906/evb1_auto/bin/rtos_riscv_sun8iw20p1.fex'
'/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t113_s4_c906_evb1_auto/img/rt_system.elf' -> '/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/device/config/chips/t113_s4/configs/sbc_t113s4_nand/bin/amp_rv0.bin'
```
然后在Tina环境中打包,确保RTOS编译固件amp_rv0.bin打包到根文件系统中。
说明:
1)buildroot需要执行./build.sh&&./build.sh pack命令
2)openwrt需要执行make&&pack命令
打包完成后,生产的固件位于tina5.0/out/t113_s4_linux_sbc_t113s4_uart0.img,可以使用PhoenixSuit工具烧录到主板上。
**3.4、RISC-V核启动**
进入主核Linux控制台后,执行如下命令即可完成RV核异构通信框架的初始化:
```
echo start>/sys/class/remoteproc/remoteproc1/state
```
注:T113-S4处理器包括了DSP HIFI核心,也包括了RISC-V核心,因此它应该具备remoteproc0/remoteproc1两个节点(这两个节点在内核的DTS中是可配置的,可以删除任何一个节点)。如果两个节点都在,那么remoteproc0节点是DSP核心,remoteproc1节点是RISC-V核心。
**3.5、RTOS镜像文件更新**
更新RTOS镜像文件的方法有以下两种:
1、Tina Linux环境下,按照RTOS编译、RTOS固件打包步骤重新编译固件,并烧录进开发板,之后再启动RV核。
2、通过adb push将新生成的镜像文件amp_rv0.bin推到/lib/firmware目录下,在Linux控制台依执行如下命令:
```
echo stop>/sys/class/remoteproc/remoteproc1/state #关闭RV。
echo amp_rv0.bin>/sys/class/remoteproc/remoteproc1/firmware
echo start>/sys/class/remoteproc/remoteproc1/state #启动RV
```
页:
[1]